Competition: Uncrewed Underwater Vehicle Testbed
DASA has launched phase 1 of Uncrewed Underwater Vehicle Testbed – Opportunity to Integrate;
Documents
Details
The Defence and Security Accelerator (DASA) is launching Phase 1 of Uncrewed Underwater Vehicle Testbed – Opportunity to Integrate.
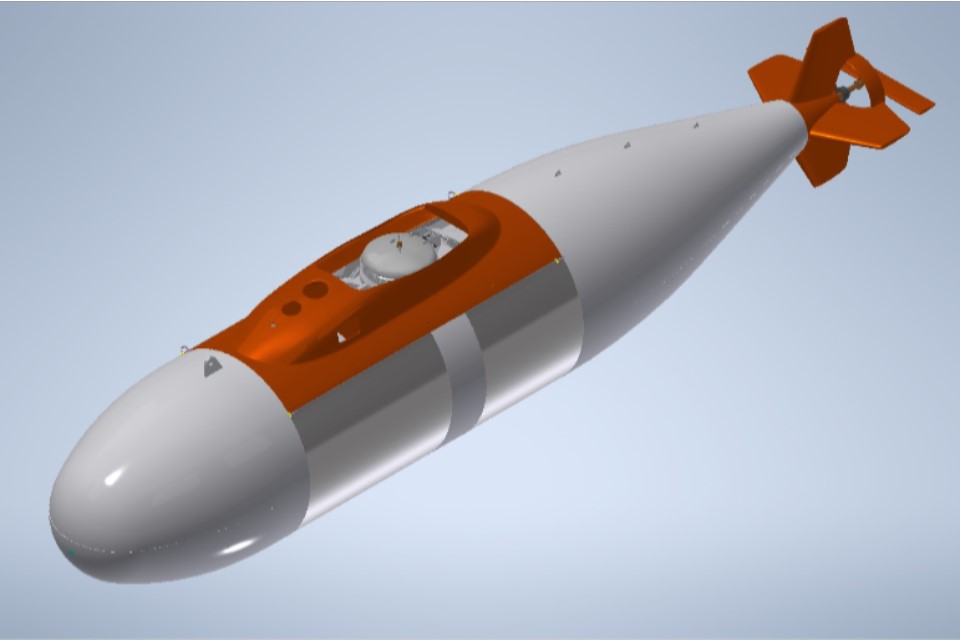
This Defence and Security Accelerator (DASA) competition seeks proposals for novel and innovative sensors and payloads to be trialled on an extra-large, uncrewed, underwater vehicle (XLUUV). The XLUUV is a platform the Royal Navy uses to understand potential capabilities of autonomous vehicles. This competition is looking for technologies ready for on-platform testing and validation which can help the Royal Navy innovate for the next generation of underwater capabilities.
The XLUUV will test sensors and payloads in a range of scenarios. The testing is not intended at this point to lead to a procurement of sensors or payloads. Rather, the key objective of this competition is to gain insights from these tests, including the potential and limitations of UUV, to help the Royal Navy shape future requirements and design future capabilities and concepts of operation.
Up to £20k will be made available to innovators who are selected from this competition, for travel and subsistence costs, and the costs of any integration and removal time.
Funding is not available for development of low TRL solutions. This is an opportunity for suppliers to demonstrate capabilities at high Technology Readiness Levels (TRL) of TRL 4 and above.
Initial one-page pitches must be submitted by 8 March 2021 at 1200 (GMT).
This competition closes on Tuesday 13 April 2021 at 1200 (BST).
There will be two sessions of pre-bookable 1-to-1 teleconference sessions on 2 March 2021 and 16 March 2021. Please register on the Eventbrite pages.
1-to-1 teleconference session 2 March 2021
1-to-1 teleconference session 16 March 2021
Queries should be sent to accelerator@dstl.gov.uk.
Updates to this page
-
Annex added to Competition Document: Technical Clarifications
-
First published.